刚刚,AI颠覆物理模拟:一句话精准仿真,学术圈半壁江山联手耗时24个月研究成果
AI视频生成这就过时了吗?
刚刚,最先进的生成式物理引擎Genesis发布,一句话就可以生成完整精确的模拟物理世界。
一滴水滴落到一个啤酒瓶上,然后沿着瓶子表面慢慢滑落
生成结果可不仅是一个视频,其中还包含物体运动的各种参数。
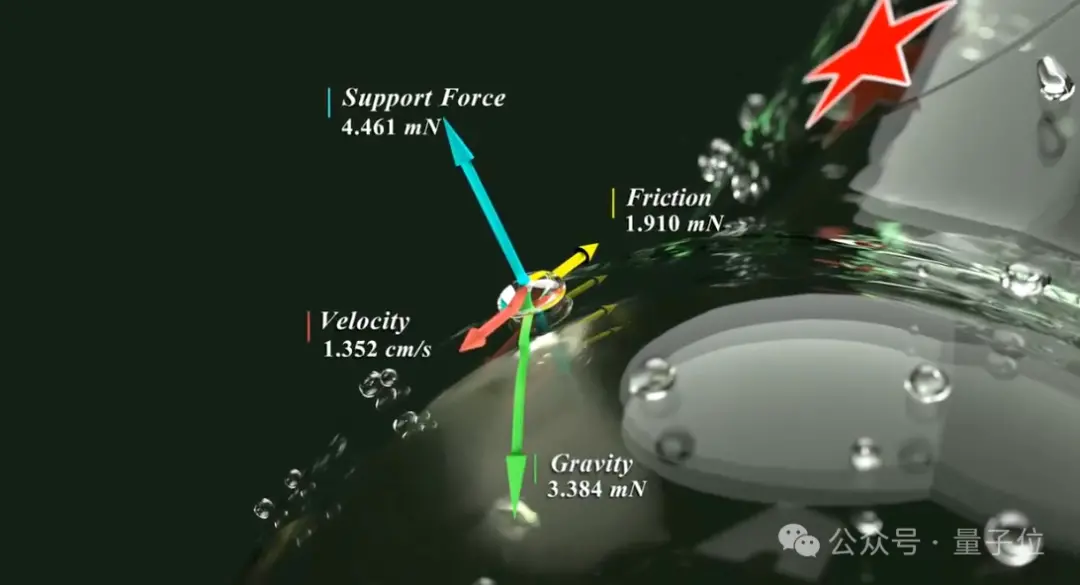
接下来可以分为三个视角,同时追踪模拟水滴的运动……
对于人物动作,也可以遵循提示词精确模拟。
一个手里拿着棍子的微型悟空在桌子表面冲刺3秒钟,然后跳到空中,并在着陆时向下摆动右臂。 摄像机从他的面部特写开始,然后稳步跟随角色,同时逐渐缩小。

当猴子跳到空中时,在跳跃的最高点,动作会暂停几秒钟……摄像机围绕角色旋转 360 度,然后缓慢上升,然后动作继续。
这是一项涉及20多个组织,为期24个月的大规模合作研究:
学术界,有清华、北大、港大、CMU、马里兰、哥伦比亚、斯坦福、MIT……说是学术圈半壁江山都参与了也不为过。
产业界,也有英伟达、太极图形,以及MIT-IBM Watson AI Lab这样的联合实验室助阵。
OpenAI在2月初次演示Sora时,曾称它是“世界的模拟器”。
相比之下,Genesis不仅物理模拟更精确,还同时有更多能力:
它是一个从头开始重建的通用物理引擎,能够模拟各种材料和物理现象。
它是一个轻量级、超快速、Python化和用户友好的机器人仿真平台。
它是一个强大而快速的照片级写实渲染系统。
它是一个生成式数据引擎,可将用户提示的自然语言描述转换为各种数据模式。
一句话总结:Genesis是一个全面的物理模拟平台,专为通用机器人、具身AI和物理AI应用而设计。
共同一作、CMU博士生周衔详细介绍了Genesis的各种能力,迅速引起业界轰动。
其中大家格外关注的一点是生成速度。
它提供的模拟速度比现实世界快约430000倍,并且只需26秒即可在单个RTX4090上训练能转移到真实机器人的运动策略。
据周衔介绍,Genesis的物理引擎用纯Python代码开发,同时比现有的GPU加速堆栈(如英伟达Isaac Gym和开源的MJX)快10-80倍。
同时,速度的提高不会影响仿真精度。
目前,团队正在开源底层物理引擎和模拟平台,对生成式框架的访问将在不久的将来逐步推出。
不得不说,从一句话生成视频到一句话生成物理世界,2024年的进展实在是太快了。
生成4D物理世界
Genesis由从头开始的通用物理引擎提供支持,将各种物理求解器及其耦合集成到统一的框架中。该核心物理引擎通过上层运行的生成Agent框架进一步增强,旨在为机器人及其他领域实现完全自动化的数据生成,包括以下模态:
物理准确且空间一致的视频
摄像机运动和参数
人类和动物角色的动作
机器人操作和运动策略,可部署到现实世界
完全交互式 3D 场景
开放世界铰接式物体生成
语音音频、面部动作和表情
角色运动
关于角色运动,除了开头展示的猴子,作者还一口气放出了三个不同风格角色的运动场景。
一位日本武士正在表演拳击。 一名罗马士兵像僵尸一样向前走。 一名中国风的战士表演江南Style舞蹈。
机器人策略
除了角色的运动,Genesis还可以自主提出机器人任务、设计环境、编写奖励函数,并最终自动生成机器人策略。
移动式franka机械臂将地板上的所有物品都扔进篮子里。

同时支持Sim2Real,把在模拟环境训练好的策略转移到真实硬件机器人中。
一个宇树H1-2人形机器人向前走。
四足机器狗双重后空翻
很可惜还有一个人形机器人单脚跳跃只有模拟演示,因为团队的机器人坏掉了……
宇树H1人形机器人执行单脚跳跃。
另外除了机器人,无人机编队也可以模拟,并呈现出正确的数量关系。
由24(4x6)架无人机组成的机队一起从地面起飞并一起进行翻转。
3D & 全互动场景生成
一个带有客厅(包括用餐空间)、洗手间、书房和卧室的家居室内场景。
互动实体俄罗斯方块游戏。

开放世界铰接式物体
生成开放世界铰接式物体的mesh资产,质量超越了人工注释,更多详细信息将随之后的论文一起公开。
软体机器人
不只是各种刚性物体,Genesis针对软性的机器人也能够实现逼真的模拟。
蠕虫。

柔软的抓手操纵盒子并拿起笔帽。
面部动画和语音
Genesis还能够处理面部动作和表情的生成:
同时还能向其中添加语音,并在面部表情不断变化的同时,保持口型与说话内容的匹配:
文本“Genesis是一个为通用机器人/嵌入式人工智能/物理人工智能应用而设计的物理平台。”对应的面部运动和语音,表情从中性过渡到愤怒,再到开心。
代码已开源,pip install
目前Genesis代码已开源,可以直接pip install genesis-world安装。
开源代码发布仅几个小时,也迅速在GitHub上揽获1.6k star。
当前版本具体特性如下
可在不同的系统(Linux、MacOS、Windows)和不同的计算后端(CPU、Nvidia GPU、AMD GPU、Apple Metal)上原生运行。
统一的仿真框架中集成了各种物理求解器:刚体、MPM、SPH、FEM、PBD、稳定流体。
支持刚性和铰接体、各种类型的液体、气体现象、可变形对象、薄壳对象和颗粒材料的仿真(和耦合)
支持多种机器人:机械臂、腿式机器人、无人机、软体机器人等,并广泛支持加载不同的文件类型:MJCF (.xml)、URDF、.obj、.glb、.ply、.stl 等
支持基于原生光线追踪的渲染
Genesis旨在与可微仿真完全兼容。目前,MPM求解器和Tool求解器是可微的,并且很快将添加其他求解器的可微性(从刚体仿真开始)
Genesis包含一个基于物理且可微分的触觉传感器仿真模块,将很快集成到公开版本中(预计在 0.2.0 版本)
另外GitHub项目页面介绍,Genesis的目标是构建一个完全透明、用户友好的生态系统,来自机器人和计算机图形学的贡献者可以聚集在一起,共同创建一个高效、逼真(物理和视觉)的虚拟世界,用于机器人研究及其他领域。
此外,Genesis相关论文已进入提交阶段,将于稍后公开。
目前更多细节可参考官方文档。
GitHub:
https://github.com/Genesis-Embodied-AI/Genesis
项目主页:
https://genesis-embodied-ai.github.io
文档:
https://genesis-world.readthedocs.io
相关内容
- 2024-12-19 传AI集成到苹果iPhone 腾讯大涨4% 字节概念股涨停
- 2024-12-19 AI创企暴雷!90后女创始人欺诈被捕:涉案7000万,或面临40年刑期
- 2024-12-19 AI成“吞电巨兽”!美监管机构警告:部分地区最早明年将电力短缺
- 2024-12-18 2024年十大科技进步,除了AI还有这九个
- 2024-12-18 AI端侧爆发,桌面机器人迎量产!产业链上市公司加码“抢鲜”
点击排行
- 105-17OpenAI多位重量级高管离职,质疑再次涌向Sam Altman
- 203-07ChatGPT-Plus,AI 助手全套开源解决方案,自带运营管理后台,开箱即用。
- 306-22RTranslator: 全球第一个开源实时翻译应用程序
- 410-18诺奖得主哈萨比斯最新访谈:仅仅将AI视作一种技术是错误的
- 505-17马斯克称OpenAI最新模型慢得离谱
- 606-23OpenAI CTO:GPT-5可能会在2025年底或2026年初推出
- 706-23企业家自曝用了ChatGPT后裁员近1/10:管理效率大幅提升
- 805-17GPT-4o被全球网友玩坏了 谷歌:终究是错付了
- 906-23高通开放AI模型,助力开发者打造骁龙X Elite平台智能应用
- 1005-17谷歌Gemini AI 计划为学校提供额外的数据保护和隐私