加州理工华人用AI颠覆数学证明!提速5倍震惊陶哲轩,80%数学步骤全自动化
加州理工团队解决了形式化研究神器Lean运行LLM推理时的核心技术挑战,可以让LLM在Lean中提出证明策略,允许人类以无缝的方式干预和修改。
Lean Copilot,让陶哲轩等众多数学家赞不绝口的这个形式化数学工具,又有超强进化了?
就在刚刚,加州理工教授Anima Anandkumar宣布,团队发布了Lean Copilot论文的扩展版本,并且更新了代码库。
论文地址:https://arxiv.org/pdf/2404.12534.pdf
最新实验表明,这个Copilot工具,可以自动化80%以上的数学证明步骤了!这个纪录,比以前的基线aesop还要好2.3倍。
并且,和以前一样,它在MIT许可下是开源的。
而对此做出巨大贡献的,是一位华人小哥宋沛洋,他是UCSB的荣誉CS本科生,加州理工学院计算+数学科学(CMS)系的SURF研究员。
网友惊呼:所以,陶哲轩现在的数学研究可以原地加速5倍了?
LLM提出证明策略,人类无缝干预
团队就发布了这个Lean Copilot的工具,希望启动人类和LLM的协作,编写出100%准确的形式化数学证明。
它解决了一个核心技术挑战:在Lean中运行LLM的推理。
通过这个工具,我们就可以让LLM在Lean中提出证明策略,允许人类以无缝的方式干预和修改。
之所以开发这个项目,是因为自动化定理证明在如今仍是一项艰巨的挑战。
我们都知道,LLM在做数学和推理任务时,时常会犯错误、产生幻觉,十分不可靠。

因此,到目前为止,数学证明大多是手动推导的,需要仔细验证。
像Lean这的定理证明工具,倒是可以形式化证明过程的每一步,但人类编写起Lean,着实很费力。
在这种情况下,Lean Copilot的诞生就显得意义重大。
让陶哲轩多次震惊的神器:数学家还不会用就完蛋了
LLM可以作为辅助人类证明定理的工具,这一论点已经被陶哲轩多次证实了。
他前脚刚在博客里预测,26年AI将和搜索、符号数学工具结合,成为数学研究中值得信赖的合著者。
紧接着,佐证他观点的研究就如雨后春笋一般源源不断地冒出来。
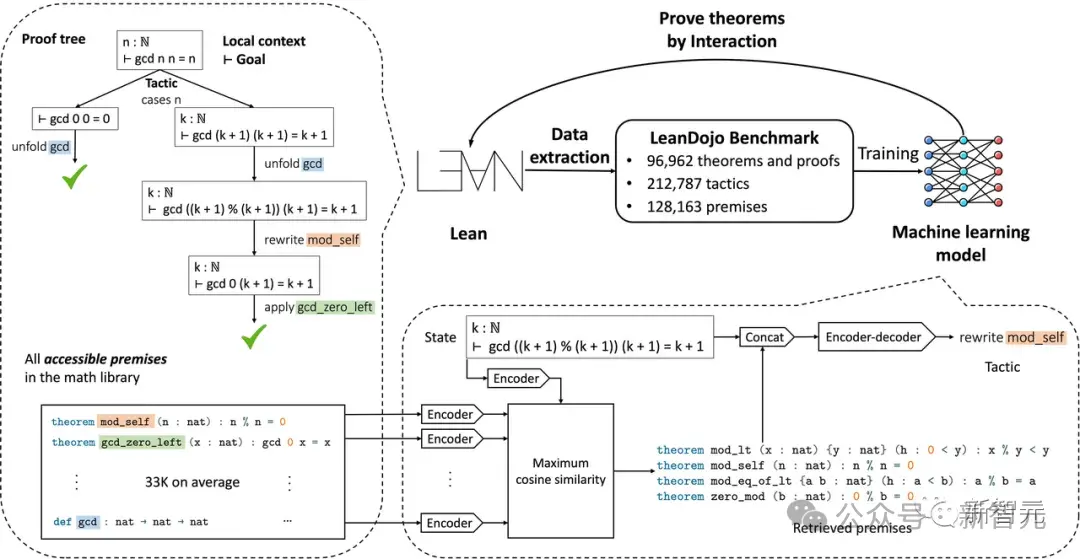
去年6月,加州理工、英伟达、MIT等机构的学者,就构建了一个基于开源LLM的定理证明器LeanDojo。
9月,微软亚洲研究院、北大、北航等机构的研究人员,通过97个回合的「苏格拉底式」严格推理,成功让GPT-4得出了「P≠NP」的结论,破解了这个千禧年难题。
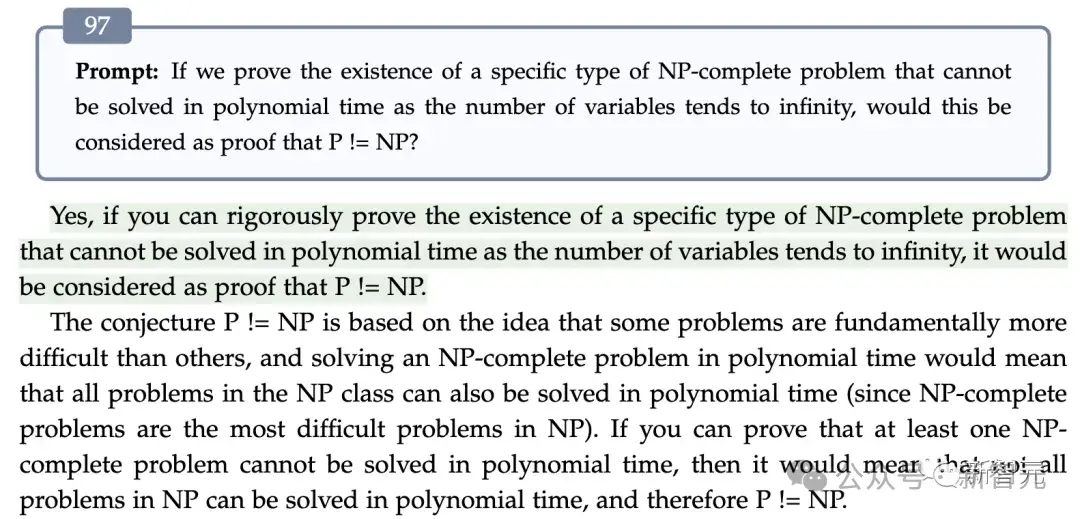
在第97轮对话中,GPT-4得出结论,证明示例在没有穷举法的情况下无法求解,证明了结论为P≠NP
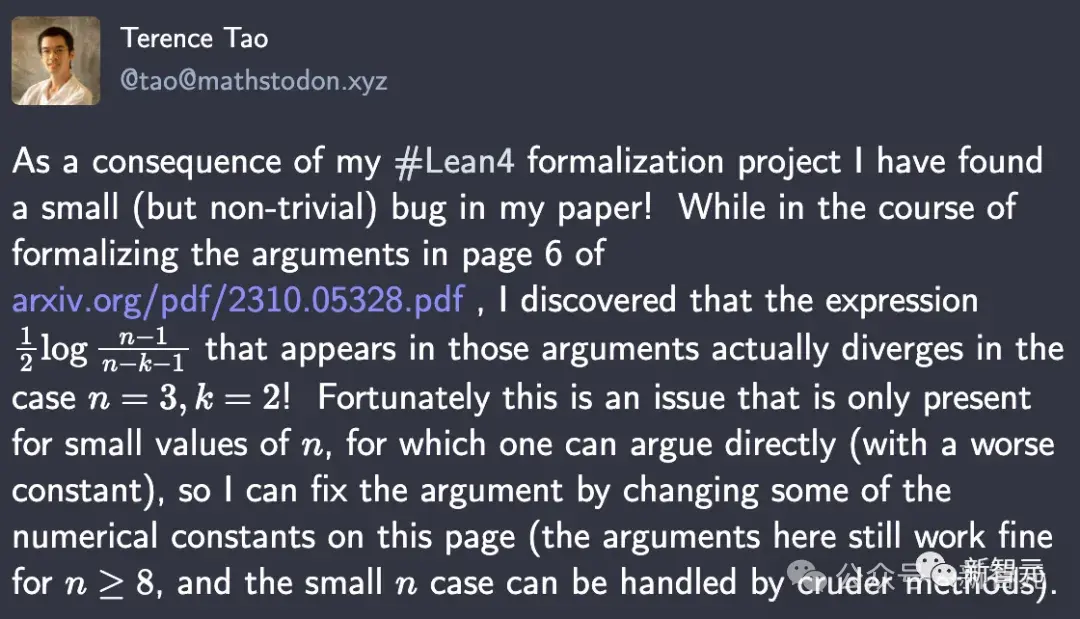
去年10月,陶哲轩在GPT-4、Copilot的帮助下,直接发现了自己论文中的一处隐藏bug。
在用Lean4形式化第6页论点的过程中发现,他发现表达式在n=3,k=2时,实际上是发散的。
这个不太容易看出的bug能被及时捉住,多亏了Lean4。原因是,Lean要求他构建0<n−3,但陶哲轩只假设了n>2。由此,Lean无法基于负的0<n−3得到反证。

这一发现直接让陶哲轩瞳孔震惊。
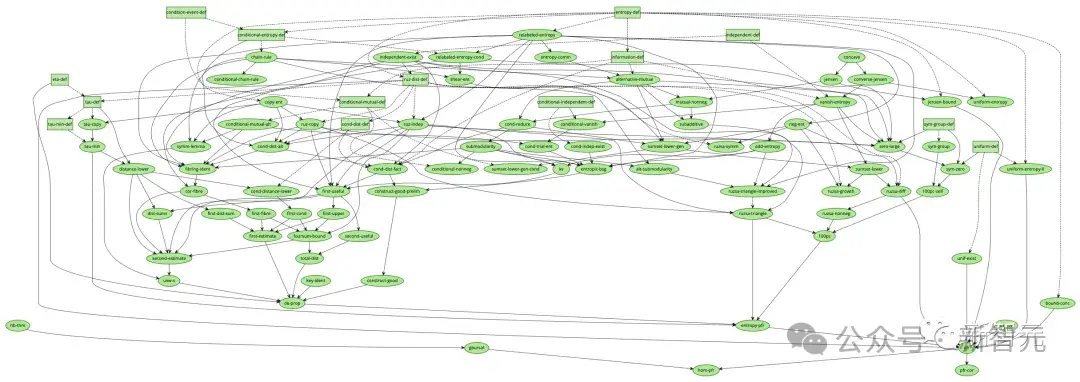
而在去年年底,陶哲轩直接成功地用AI工具,完成了形式化多项式Freiman-Ruzsa猜想证明过程的工作。

最后,依赖关系图已经完全被绿色所覆盖,Lean编译器也报告说,这个猜想完全遵循标准公理。
在这个过程中,所有最前线的数学研究者,都在第一时间感受到了AI对于数学研究颠覆力量的直接冲击。
Lean Coilot,让Lean更好用
而今天,Lean Copilot的这项研究,让Lean直接变得更强大了。
在这篇论文中,团队基于Lean Copilot构建了一些工具,用于建议证明步骤(策略建议)、完成中间证明目标(证明搜索)和使用LLM选择相关前提(前提选择)。
实验结果也充分表明了,跟Lean中现有的基于规则的证明自动化相比,Lean Copilot在辅助人类自动化定理证明上,是有效的。
Lean Copilot提供了一个通用框架,可以通过CTranslate 2在本地,或者在服务器上运行LLM的推理。
通过这个框架,用户就能创建各种自动化证明工具。

Lean是一个在数学家中很受欢迎的证明助手。如下图所示,Lean中的一个证明,是由一系列被称为策略(tactics)的证明步骤组成。

从整个定理开始作为初始目标,策略反复地将当前的目标转化为更简单的子目标,直到所有目标都被解决。
用户在由VSCode驱动的IDE中交互编写策略,在右边的infoview面板中显示目标。
生成策略建议
利用Lean Copilot,团队构建出了suggest_tropics,一种用LLM生成策略建议的工具。
而它本身,也是一种策略。
应用时,它将当前目标输入LLM,并且从LLM获取生成的策略候列表。
它会查看每个选项,看它们是否会 1)导致错误;2)结果没有错,但不能完成证明;3)顺利完成证明。
如果是1),这个策略就会被删除。
只有无错误的策略,才会显示在右边的视图面板中。
其中,成功完成证明的策略,使用绿色标记(类别3);没有错误改变证明目标,但未完成证明的策略,使用蓝色标记(类别2)。
注意!当所有列出的策略都属于类别2时,这个信息对于用户来说,可能极有价值。
在这种情况下,剩余目标的信息,可以直接帮助用户选择策略,作为下一个中间证明步骤。
看到建议后,用户可以选择是否接受,或使用它们作为灵感来源,制定新策略。
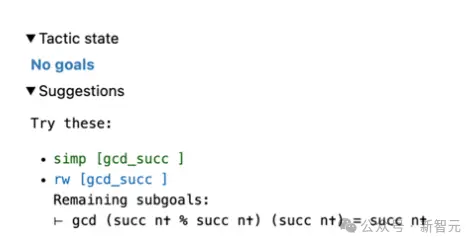
比如,我们在Lean代码中定义了一个定理add_abc,它的初始目标如图3右所示。
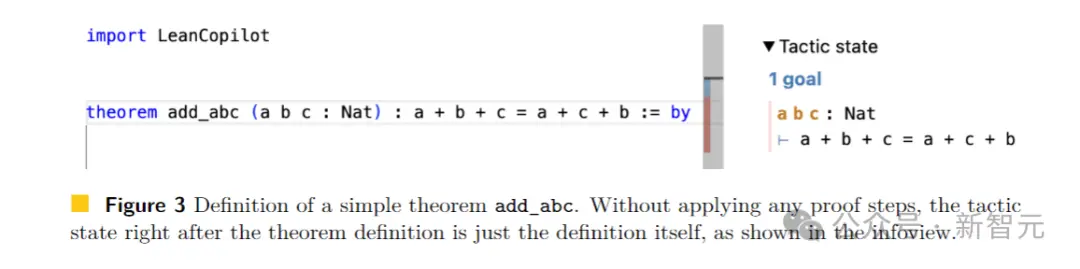
当我们输入suggest_tropics时,会在右边看到策略建议。
第一个策略显示为绿色,表示证明已成功完成。
接下来三个建议均为蓝色,这就表明无法直接完成证明,但不会导致错误。
因而,它们很有可能是有效的中间证明步骤!
同时,剩余子目标也显示了出来。
而Tactic state字段显示No goal,是因为至少有一个策略建议可以被证明。

搜索完整证明
此外,因为人类和机器都不能始终如一地产生正确的策略,因此在这个过程中必须回溯、探索不同的替代方案,这个过程就是证明搜索。
当是上面所说的Suggest_tropics,仅能生成当前步骤的策略,不具备搜索多策略证明的能力。
为此,团队将其与基于规则的证明搜索工具aesop结合起来,构建了一个基于LLM的证明搜索工具。
Aesop会将最佳优先搜索作为Lean的策略实施,并且允许用户配置搜索树的扩展方式。

搜索树是由作为节点的目标组成。
起初,它只有原始目标作为根节点。在每一步中,aesop都会选择最有希望的未扩展节点,通过应用策略对其扩展,将生成的节点添加为子节点。
而当aesop找到一条从根源到可轻松解决的目标的路径,就证明搜索成功了!
因此,aesop的性能关键取决于用户是否配置了有效的规则集。
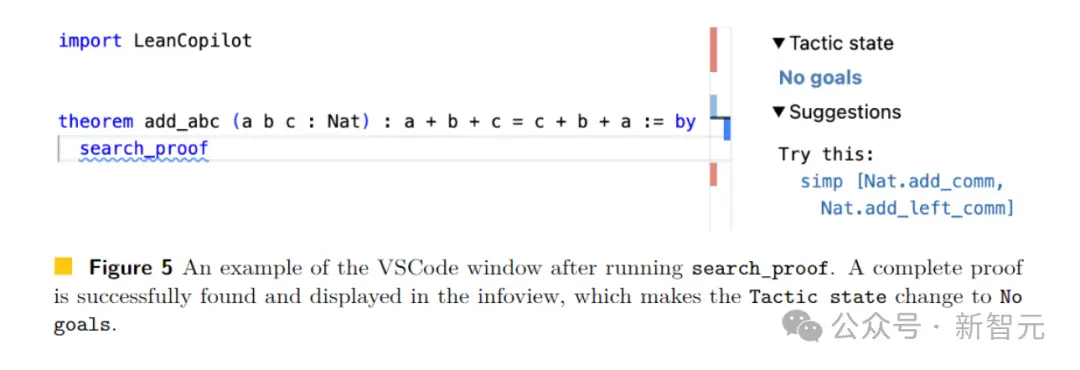
这就可以看出,aesop缺乏灵活性。因此,Search_proof通过在每一步中由suggest_tropics生成的目标相关策略,来增强aesop的规则集,让它变得更加灵活。
对于图3中的原始目标,用户只需输入search_prrof,找到可以解决目标的完整证明,就显示在了信息视图中(图5右)。
可以看到,由于发现了成功的证据,所以剩余的Tactic state是No goals。
选择注释好的前提
此外,定理证明中另一项具有挑战性的重要任务是,找到减少或完成证明的相关前提。
除了源码库和标准库中有大量前提,Lean还有一个大型数学库(Mathlib)。
然而,从所有库中搜索候选前提,极其困难且耗时耗力。
所以许多人都试图,能在Lean,或其他的证明助手中得到辅助,或自动完成这一过程。
在Lean中,最先进的前提选择方法是,直接在Lean中实现的基于随机森林(random forest)的框架。
然而,前提选择任务非常适合检索增强型LLM,即在大模型训练期间训练检索矩阵(前提嵌入),以估计证明目标与候选前提之间的相关性。
给定推理时的证明目标,首先将目标编码成一个向量,然后在前提嵌入和目标向量之间执行矩阵向量乘法。
然后,为了选择前k个前提(其中k可以是一个超参数,决定用户想要返回多少个前提),这时只需返回得分最高的k个前提。
而要在Lean中执行推理任务,除了Lean Copilot提供的快速推理外,还需要一个高效的矩阵乘法库和一个C++的numpy矩阵阅读器。
研究人员采用了来自CTranslate2的矩阵乘法函数,和来自Libnpy的C++快速numpy文件阅读器。
他们再次通过FFI机制,将这些数链接到Lean。
因此,前提选择的策略可以非常高效地运行,因为前提嵌入可以预先计算,所有后续操作都可以使用上文介绍的库在C++中快速完成。
在获得返回的前提后,研究者进一步用有用的信息对其进行注释。
这里将所有前提所分为两类:可直接在当前环境中使用的前提(范围内前提)和不可直接在当前环境中使用的前提(范围外前提)。
这取决于是否导入了所需的软件包。
如果已经导入了前提所需的包,则可以轻松使用该前提。如下图6显示了带注释的范围内前提。
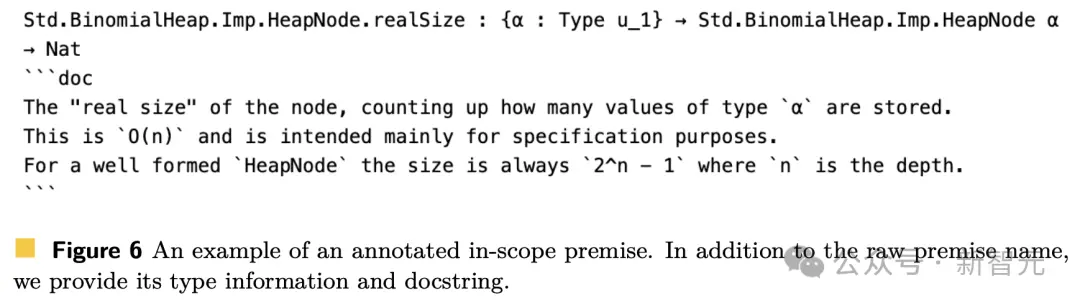
图7所示是带注释的范围外前提。

下面举个使用「前提选择」的例子,对于图3中的定理add_abc,可以直接在证明中输入select_premises(图8左)。
然后,相关前提的列表,就会出现在信息视图中(图8右)。
对于这个简单的定理,可以清晰看到所选的前提确实相关,因为它们都与自然数和加法规则有关。
在这种情况下,所选的4个前提都在当前范围内,这意味着它们的模块已经导入。

如上,便是研究人员通过Lean Copilot构建的三个实用的证明自动化工具,用于策略建议、搜索证明和前提选择。
81.2%的证明步骤,全都自动化了
通过Lean Copilot框架,研究人员凭经验提出了假设——在Lean交互式定理证明(ITP)中进行人机协作是有益的。
由于Lean中的定理证明过程,主要以策略证明为主。
相关内容
- 2024-11-25 AI杀死了程序员培训班:花1.3万美元学编程,却连面试机会都没有?
- 2024-11-25 AI推演OpenAI内斗结果:奥特曼仅有20%胜率,马斯克也有机会接盘?
- 2024-11-25 全面AI转型,高通剧透了智能终端的下个十年
- 2024-11-25 主流AI硬件缺一个爆款 AI玩具先卖断货了
- 2024-11-23 黄仁勋获港科大荣誉博士,演讲大秀中文,称AI可能是人类历史上最重要的技术
点击排行
- 105-17OpenAI多位重量级高管离职,质疑再次涌向Sam Altman
- 206-22RTranslator: 全球第一个开源实时翻译应用程序
- 303-07ChatGPT-Plus,AI 助手全套开源解决方案,自带运营管理后台,开箱即用。
- 410-18诺奖得主哈萨比斯最新访谈:仅仅将AI视作一种技术是错误的
- 505-17马斯克称OpenAI最新模型慢得离谱
- 606-23OpenAI CTO:GPT-5可能会在2025年底或2026年初推出
- 706-23企业家自曝用了ChatGPT后裁员近1/10:管理效率大幅提升
- 805-17GPT-4o被全球网友玩坏了 谷歌:终究是错付了
- 906-23高通开放AI模型,助力开发者打造骁龙X Elite平台智能应用
- 1005-17谷歌Gemini AI 计划为学校提供额外的数据保护和隐私